




Next: Station housing
Up: THE AURORAL LARGE IMAGING
Previous: Concluding remarks
Contents
Index
The Instrumentation Platform
``It might be the warriors who get the glory, but it's the
engineers who build societies''
Any scientific instrumentation, regardless of whether it is manual or
automatic, ground-based or space-borne, needs some basic supporting
infrastructure in the form of:
- Structural support of the instrument, for example the satellite platform or a measurement structure with instrument stand.
- Environmental subsystems, keeping environmental parameters
(for example temperature) within acceptable limits.
- Power supply and conditioning devices.
- Control subsystems. Anything from a simple switch to a sophisticated
telecommand system.
- Monitoring subsystems. Anything from eyeball observations of an instrument reading to a complex telemetry system.
- Communication subsystems.
- Data processing and storage subsystems.
For space-borne instruments, many of these functions are provided by
the spacecraft platform. In the ground-based case many of these
requirements are often more relaxed due to a less-hostile environment
and the proximity to the general infrastructure of human civilisation.
However if unmanned measurement stations are deployed in a
sparsely-populated area with a sub-arctic climate, some requirements
on the instrument platform becomes as demanding as in the space-borne
case. Thus the ALIS-project required a closer examination of
the basic infrastructure than most ground-based facilities in the
field. The required basic infrastructure for low-light imaging
stations could to a large extent also be used by other instruments
(not necessarily optical), or even in entirely different contexts.
Thus, these efforts to provide a housing for the ALIS stations
resulted in the concept of a Ground-based Low-light Imaging
Platform (GLIP) which constitutes the major part of an ALIS station.
The GLIP was designed in such a way that it should be able to operate
in the harsh climate of the Kiruna region without any manual attendance
for a period of up to 8 months. It was a requirement to be able to
monitor and control all necessary functions of the GLIP remotely, even
if the normal means for controlling the station should fail. In the
case of a total communication- and control failure, critical
subsystems, such as heaters and sensitive detectors, should enter a
safe survival mode. The station should furthermore be able to
continue operation even if the control centre failed. Finally, the GLIP
would be designed in a modular fashion, so that the various subsystems
and instruments should be easy to replace for maintenance, etc. The
major subsystems of the GLIP are described in the following sections;
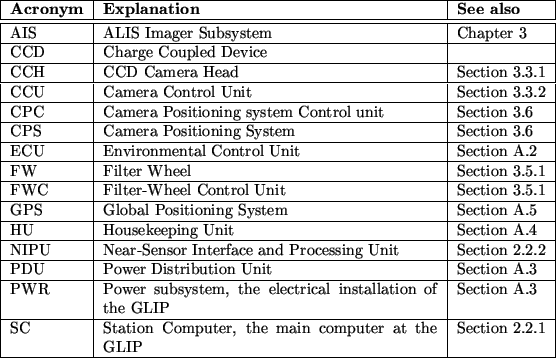
refer to the block diagram in Figure A.1.
Figure A.1:
Block diagram of the Ground-based Low-light Imaging Platform.
The acronyms are explained in Table A.1
|
|
Table A.1:
Explanation of acronyms in Figure A.1.
 |
Subsections
Next: Station housing
Up: THE AURORAL LARGE IMAGING
Previous: Concluding remarks
Contents
Index
copyright Urban Brändström
![\includegraphics[width=\textwidth]{eps/ip/glip.eps}](img578.png)